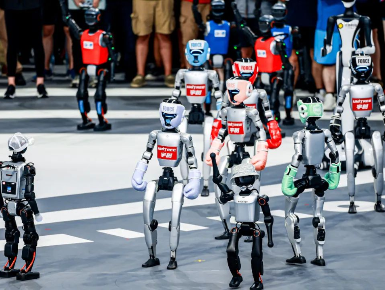
2月10日、北京ヒューマノイドロボットイノベーションセンターは次世代汎用ロボットプラットフォーム「具身天工3.0」を発表した。これは業界初となる物体との接触・インタラクションを伴う全身高動的運動制御を実現したフルサイズのヒューマノイドロボットである。
具身天工3.0は、より高い四肢の瞬発力と本体の安定性を備え、起伏に富み、障害物の多い複雑な環境でもバランスを保ち、多様なシナリオにおける作業ニーズに対応できる。模擬工業環境では、ロボットが障害物の乗り越え、高瞬発的な連続動作などの複雑な運動を完了でき、さらに跪いて作業を行ったり、腰をかがめて方向転換を行ったりする細かい操作も可能で、狭い空間や制限された姿勢でも安定した操作能力を維持できる。
具身天工3.0は、よりオープンなソフト・ハードウェアインターフェースを提供し、各業界の開発コストと参入障壁を大幅に低減させた。ハードウェア面では、多様な拡張インターフェースを予め確保し、各種外部ツールの柔軟な接続をサポートすることで、特殊作業、工業製造、商業サービスなどの多様なシナリオにおけるニーズに迅速に対応できる。ソフトウェア面では、「慧思開物」プラットフォームエコシステムを基盤に、完全な開発ドキュメント、ツールチェーン及びローコード開発プラットフォームを提供し、主要な通信プロトコルに全面的に対応している。
今後、北京ヒューマノイドロボットイノベーションセンターは「具身天工3.0」と「慧思開物」プラットフォームを基盤として、産業チェーン・エコシステムのパートナーと連携し、多分野のシナリオにおけるヒューマノイドロボットの実用化を共同で推進し、人間-機械協調の新段階への発展を加速させていく。
情報提供:北京日報